
Guía 5 - Impulso Lineal
Impulso lineal - Cantidad de movimiento
En física, la cantidad de movimiento se define como la multiplicación de la masa de un objeto por su velocidad, ósea . Para dejar clara su definición valdría la pena relacionar la cantidad de movimiento con la segunda ley de Newton.
Es muy importante que prestemos atención a la expresión porque nos indica como una resultante de fuerzas puede generar una cambio en la cantidad de movimiento de un cuerpo en una determinado tiempo.
Dicho esto, podemos decir que la cantidad de movimiento de un cuerpo es una característica de la dinámica del cuerpo en un momento determinado y que solo se puede ver perturbada por la aparición de fuerzas externas.
Ley de conservación del impulso lineal
Para que la cantidad de movimiento ser conserve, es preciso que , lo que implica que la cantidad de movimiento de un cuerpo es constante o lo como se menciono anteriormente, si ninguna fuerza resultante perturba al cuerpo, entonces .
Esto puede sonar hasta trivial para cuerpos puntuales, pero su aplicación se intensifica con la aparición de sistemas de partículas.
Consideremos por un el momento un sistema , formado por dos sub sistemas que interactúan entre ellas. El sistema es un sistema aislado, donde , y donde las únicas fuerzas existentes son las que actúan en la interacción entre .
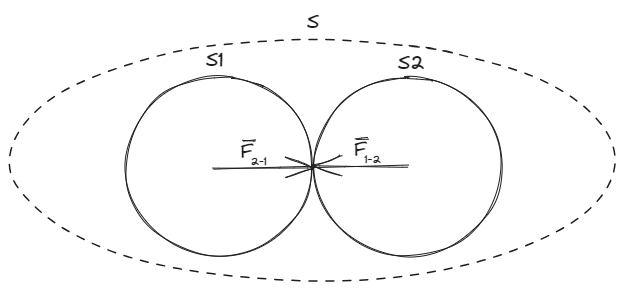
Por la tercer ley de Newton, sabemos que las fuerzas son iguales en magnitud y contrarias vectorialmente, ósea . Como es un sistema aislado, podemos asegurar que las fuerzas son las únicas que actúan sobre los sistemas , pudiendo decir que y que .
Con todo lo mencionado, podemos afirmar que . Esto último nos demuestra que en sistemas donde existen al menos dos sub sistemas, la variación de movimiento de uno de ellos, se ve compensado por su contra parte, por lo que la variación total del sistema es siempre nula.
Donde es la cantidad de movimiento total del sistema constante. Que , solo reafirma nuestra hipótesis de que el sistema se encuentra aislado, ósea que
En un sistema aislado con múltiples partículas interactuando, la suma de las cantidades de movimiento van a ser tal que se anulen entre si mismas, lo que su vez implica que las fuerzas, ahora definidas como fuerzas internas, no pueden formar parte de un análisis físico del sistema, porque se anulan. Las únicas fuerzas que importan son las externas.
Ahora la segunda ley de la conservación resulta ser más relevante ya que se puede aplicar a cualquier sistema de partículas.
Para expresar adecuadamente que en sistemas donde existen al menos dos sub sistemas, la variación de movimiento de uno de ellos, se ve compensado por su contra parte, por lo que la variación total del sistema es siempre nula, es necesario realizar la siguiente operación.
Ejemplo practico
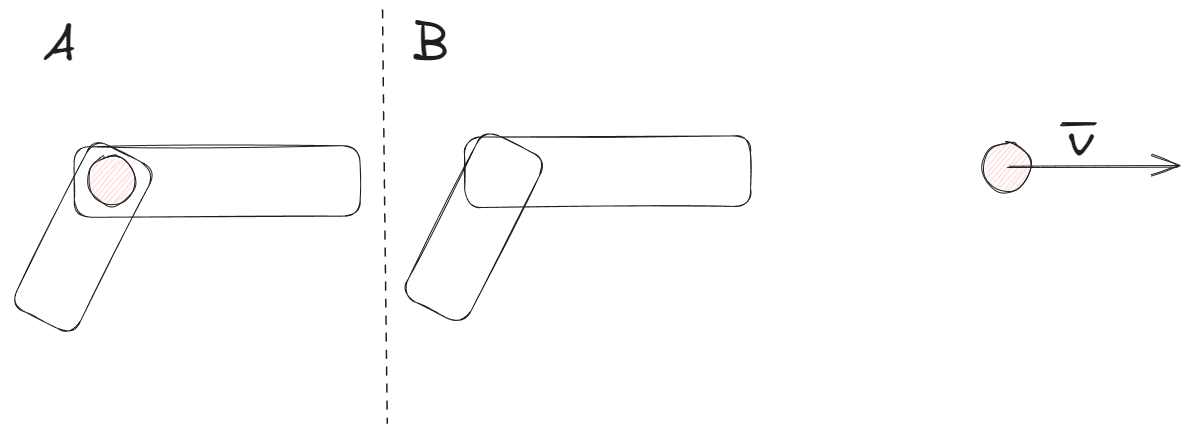
Supongamos un sistema formado por un arma y una bala. Inicialmente, ambos cuerpos se encuentran en reposo por lo que su cantidad de movimiento es nula. En un instante posterior, la bala fue disparada con una velocidad dada. Lo que se quiere determinar es la velocidad de rebote que percibe la persona que sostiene el arma.
En el instante , el sistema aun se encuentra aislado, por lo que se puede afirmar que la variación en la cantidad de movimiento del sistema es igual a cero.
Como inicialmente tanto la bala como el arma se encontraban en reposo, la variación en la cantidad de movimiento solo esta dada por el estado de ambos subsistemas en el instante .
Como la masa de la bala es significativamente menor que la masa del arma, la relación hace que la . De aquí que podemos decir que la velocidad de rebote percibida por el usuario del arma es mínima.
Sistema de partículas
En un sistema constituido por partículas, podemos decir que
La variación en la cantidad de movimiento del sistema se puede reflejar en
Siendo la resultante de las fuerzas actuantes sobre la partícula . Si resulta que esas fuerzas son solo internas, entonces la cantidad de movimiento del sistema se conserva derivando en resultados ya vistos. En el caso en que existan fuerzas externas, entonces
Es importante entonces que sobre cada partícula actúan tanto fuerzas internas como externas al sistema. Dado que las internas se cancelan entre si, solo restan las externas.
Centro de masa de un sistema de partículas
En un sistema constituido por partículas, su masa total es igual a la suma de las masas de todas las partículas que la conforman, es decir
La cantidad de movimiento del sistema en su conjunto esta dada por y por , donde es la velocidad del centro de masa. Dicho esto, es fácil ver que
Esto quiere decir que la velocidad del centro de masa es un promedio ponderado de las velocidades de las partículas que la conforman, en relación al aporte de su masa a la masa total.
Dado que , es posible integrar la expresión anterior y conseguir finalmente la posición del centro de masa.
Suena trivial decirlo, pero vale la pena mencionarlo. La posición del centro de masa es un promedio ponderado de las posiciones de las partículas que la conforman, en relación al aporte de su masa a la masa total.
No son triviales ambas menciones, tanto con , como con , ya que intuitivamente podemos dar ciertas afirmaciones en determinados problemas con solo ver las masas que conforman un sistema.
Lo interesante de los resultados vistos hasta el momento radica principalmente en el hecho de que podemos dejar la joven idea de hablar sobre objetos puntuales con una velocidad y una posición dada, para madurar a un pensamiento mucho más realista donde los objetos pueden ser mucho más complejos y aun así, pueden ser descriptos con facilidad.
De la expresión , aplicando derivada se puede ver la siguiente expresión un tanto conocida
Donde es la aceleración del centro de masa. Es de aquí que podemos afirmar que si el conjunto de fuerzas externas aplicada sobre un sistema se anulan entre si, entonces la velocidad del centro de masa resultara constante, dando por consiguiente, un movimiento del tipo rectilíneo uniforme.
Colisiones
Colisiones plásticas
Si bien podemos visualizar y determinar la dinámica de dos cuerpos desde un sistema de referencia fijo externo como lo puede ser el de laboratorio, todo cambia cuando poseemos el concepto de centro de masa, dado que ahora podemos localizar nuestro sistema de referencia fijo en él.
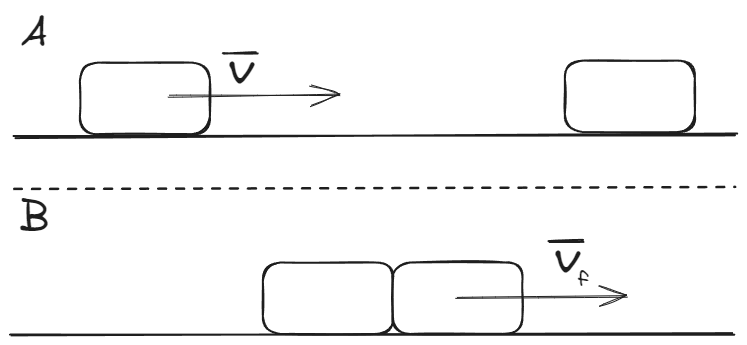
Localizar el sistema de referencia sobre el centro de masa de un sistema tiene algunas ventajas. Supongamos que sobre unos rieles, se encuentran dos vagones. Inicialmente, el vagón posee una velocidad , mientras que el vagón se mantiene en reposo
Si tras colisionar, estos se mantienen unidos en lo que se conoce como un choque plástico, debemos determinar cual es la velocidad final del sistema.
Digamos que ambos vagones tienen la misma cantidad de masa . Dado que las únicas fuerzas externas son las de peso y la normal, ambas se anulan, conservando la cantidad de movimiento del sistema.
Esto quiere decir que la cantidad de movimiento en el instante , debe ser la misma que en el instante .
Si pretendemos resolver la misma situación desde un sistema de referencia puesto sobre el centro de masa del sistema, deberemos usar un tipo de análisis relativo donde
Por lo que sabemos, la velocidad del centro de masa se puede calcular como
Dicho esto, podemos calcular la velocidad de cada uno de los vagones con respecto al centro de masa.
Este resultado nos indica que desde la perspectiva del centro de masa, ambos vagones se acercan a igual velocidad. Cuando finalmente se encuentran y quedan “pegadas” por así decirlo, lo hacen en el punto cero y se quedan juntas, por lo que la velocidad final es cero, esto visto desde el centro de masa.
Colisiones elásticas e inelásticas
En lo que a colisiones se refiere, existen dos variables. Por un lado la cantidad de movimiento, que en general es constante y por el otro, la energía. En el caso de las explosiones o los choque plásticos, la energía no se conserva. En el primer caso, hay un incremento de energía expresado en la velocidad, mientras que el segundo caso, hay un decremento de energía que se pierde en la deformación de los cuerpos.
En los choques elásticos, la energía cinética si se conserva. Esto característica es la diferencia que posee con las colisiones inelásticas, donde la cantidad de movimiento se conserva, pero la energía se disipa en la deformación de alguno de los cuerpos.
Para poner en practica y entender mejor los conceptos mencionados, veamos un ejemplo clave. Sea un sistema de dos partículas con masas y velocidades iniciales respectivamente.
Se desea conocer las velocidades adquiridas por cada uno de las partículas tras un choque del tipo elástico. De acuerdo a los datos, se pueden expresar las siguientes ecuaciones del estado inicial del sistema
En un estado post colisión nos encontramos con las siguientes ecuaciones e incógnitas
Por la conservación en la cantidad de movimiento y energía, se plantean las siguientes equivalencias.
Por la propiedad , podemos expresar la segunda ecuación como
Y si se realiza un cociente entre la expresión recién mostrada y la primera ecuación, llegamos a la siguiente igualdad
De esta última ecuación y la primera se pueden despejar las incógnitas y responder a la pregunta inicial.
De estas expresiones podemos verificar que ocurre en ciertos casos borde donde la velocidad inicial de alguno de los cuerpo es cero o que un cuerpo es significativamente más masivo que el otro.
Características adicionales del centro de masa
- Si un sistema esta formado por dos partículas, entonces el centro de masa del sistema se encuentran entre ambas partículas y sobre la recta que las une.
- En sistemas de partículas homogéneas o simétricas, el centro de masa puede ser calculado de forma geométrica. Por ejemplo, el centro de masa de una esfera homogénea (no existe un sector más denso que otro), el centro de masa será el centro de la esfera. Esto puede tomarse como generalización del punto anterior, para el caso en que ambas partículas tienen la misma masa.
- Sea un sistema conformado por cuerpos homogéneos, se puede calcular el centro de masa del sistema a partir del centro de masa de cada uno de los cuerpos. Esto también se puede entender como una generalización del punto uno, donde las partículas representan el centro de masa de los cuerpo.