Guía 5 - Impulso angular
Impulso angular
El concepto de impulso angular es análogo a de impulso lineal (cantidad de movimiento), pero que adquiere relevancia cuando el movimiento a describir no es rectilíneo.
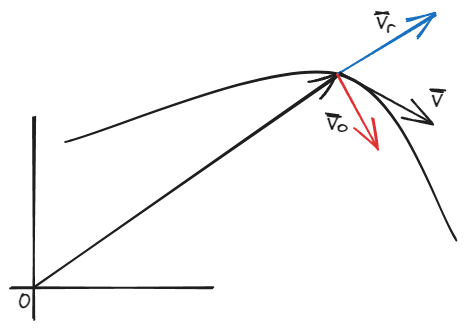
Uno siempre puede describir un movimiento como una combinación de dos movimientos, uno radial () y otro angular (). Desde esta perspectiva, la cantidad de movimiento se puede expresar como
Dicho lo anterior, podemos definir al impulso angular como
Observamos entonces que el impulso angular como un producto vectorial entre el vector de posición y la velocidad angular, que da como resultado un vector perpendicular al plano formado por los vectores , y que es máximo dado que dichos vectores son perpendiculares a su vez. De aquí que al impulso angular también se lo conoce como momento de la componente angular del impulso o momento angular para abreviar.
Notemos que depende directamente del sistema de referencia o desde donde se lo observe. A este punto desde el cual se define al momento se lo conoce como centro de momentos.
Es entonces que podemos relativizar a si lo observamos desde otro punto de referencia.
Es así que podemos observar como cambia visto desde otro punto .
Tanto como pueden ser puntos cualquiera de un mismo sistema de referencia. No tienen porque ser el origen de un sistema de coordenadas.
Ley de conservación del impulso angular
Así como , también puede permanecer constante dadas ciertas condiciones. Si entendemos a , entonces su derivada se expresa como
A esta última expresión se la conoce como momento de fuerza externas o torque, y se lo simboliza como . Entonces, para que sea constante es importante que su derivada valga cero, es decir, , y esto es si y solo si, la resultante de las fuerzas externas y el vector de posición son paralelos. En ese caso, definimos a las fuerzas existentes como centrales.
Es interesante observar que si el impulso lineal se conserva, tenemos un movimiento rectilíneo uniforme. Si el impulso angular se conserva, entonces tenemos un movimiento circular uniforme, esto visto desde el centro de momentos.
Por otro lado, si el movimiento que describe un cuerpo es rectilíneo, siempre podremos encontrar un centro de momentos tal que el impulso angular se conserve.
Centro de momentos móvil
Anteriormente dimos a conocer los conceptos validos para calcular desde centro de momentos alternativos, llegando a la expresión
Supongamos ahora que el centro de momentos alternativo se encuentra en movimiento con una velocidad . El cambio en relación al impulso angular , se puede resumir en
Primer ejemplo practico
Sea un cuerpo de masa con una velocidad constante , que gira en torno a un centro de rotación (), a una distancia . Se desea calcular el impulso angular que adquiere el cuerpo visto desde un punto que se encuentra en el mismo eje que el centro de rotación pero a una distancia desconocida.
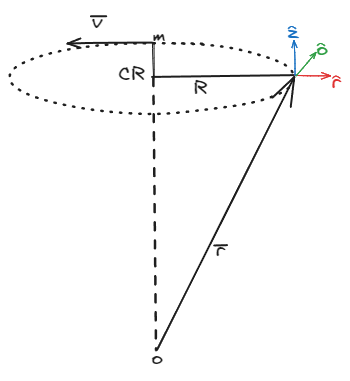
Los datos serán expresados en torno a los versores . Dicho todo lo anterior, podemos decir que el impulso angular del cuerpo puede expresarse como
Rápidamente observamos que por tener una componente en el versor , el impulso angular cambia, lo que implica que el momento de fuerzas externas es distinto de cero, lo que a su vez, indica que existen fuerzas no centrales. Estos resultados a priori no coinciden con un movimiento circular y uniforme.
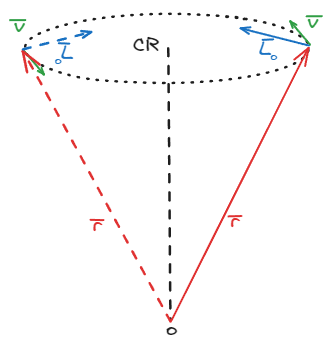
Si bien es cierto que cambia dada su componente en no es así con su componente en , lo que nos indica que el cuerpo se esta moviendo en un plano que por el momento desconocemos.
Si cambiamos las condiciones del problema y observamos el impulso angular desde el centro de rotación, la componente en de los resultados iniciales se anula automáticamente, dado que . En su lugar, queda representado únicamente por su componente en , que como ya dijimos, es constante, lo que implica que el torque es nulo. Esto último confirma que el movimiento presentado por el cuerpo es del tipo circular y uniforme, plantado sobre el plano perpendicular al versor .
Lo que destacamos de las recientes conclusiones es que el impulso angular no solo nos puede ayudar a conocer la dinámica del cuerpo, sino que además, puede dar pistas sobre la trayectoria que sigue el objeto en estudio.
Segundo ejemplo practico
Supongamos un cuerpo de masa que se mueve a una velocidad constante en línea recta. Se desea conocer el impulso angular del objeto visto desde el punto .
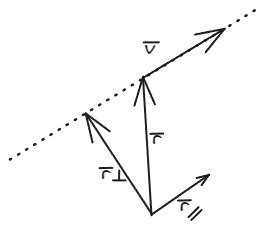
El vector de posición puede ser visto como una composición de dos vectores, uno que es paralelo a la trayectoria del cuerpo, y otro que es perpendicular. Llamemos a la proyección perpendicular y al paralelo.
Entonces, procedemos a calcular el impulso angular del cuerpo
La componente tiene la particularidad de que es constante, por lo que el impulso angular es constate. En este caso, el movimiento descripto por el cuerpo no es un movimiento circular uniforme, pero aún así, muestra un impulso angular constante.
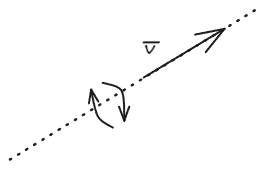
En el caso del impulso lineal, uno decía que si este es constante, entonces necesariamente existe un movimiento rectilíneo uniforme, pero en el caso del impulso angular, que este último sea constate, puede significar que estemos frente a un o , y que es ambos tienen una dinámica simétrica.
En el MCU, el movimiento es simétrico respecto al centro de rotación donde debe estar contenido el centro de momentos. En , es simétrico en su rotación en torno a su trayectoria (que es nula, pero eso también es simetría).
Impulso angular en un sistema de partículas
Podemos decir que el impulso angular de un sistema de partículas visto desde un punto es
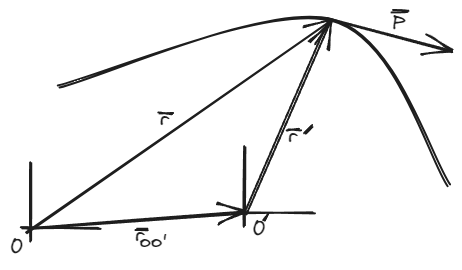
Ahora realizaremos una reinterpretación importante para la resolución del problema. Al vector de posición de cada partícula se lo representa de la siguiente forma
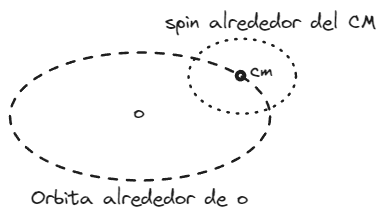
Donde es la posición del centro de masa del sistema y es la posición de la partícula visto desde el centro de masa. Aplicando esta nueva expresión a se obtiene
Es decir que el impulso angular de un sistema de partículas queda descripto a partir del impulso angular visto desde el centro de masa y por el impulso angular de un “todo” contenido en una partícula localizado en la posición del centro de masa. El componente se lo conoce como impulso angular de spin que nos permita ver al sistema desde el centro de masa. Mientras que al componente se lo conoce como impulso angular orbital que nos permite ver al sistema como un todo desde el punto .