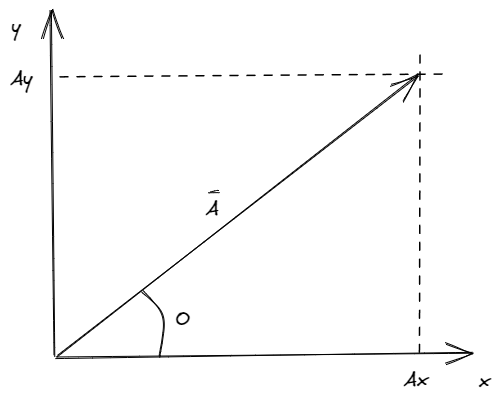
Un vector en dos dimensiones posee dos componentes: una componente horizontal y una componente vertical. La componente horizontal se denota como Ax y la componente vertical se denota como Ay. Estas dos componentes se pueden combinar para formar el vector original mediante el teorema de Pitágoras:
A2=Ax2+Ay2
Donde A=∣A∣, y A forma un ángulo θ con relación al eje x. Dicho esto, las siguientes funciones trigonométricas se cumplen
Ax=Acosθ
Ay=Asinθ
tanθ=AxAy
Desplazamiento, velocidad y aceleración en dos dimensiones
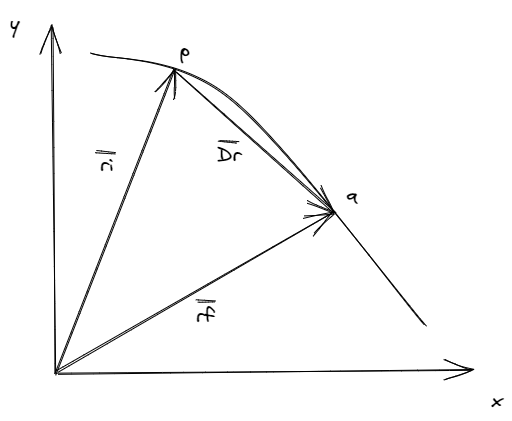
Ahora la trayectoria de un objeto posee mucho más interes, ya que no solo se mueve sobre una recta, sino que lo hace sobre un plano. Si proponemos a ri y rf como vectores de posición inicial y final correspondientemente, podemos decir que el vector Δr que une los puntos p y q es el vector desplazamiento, por tanto vale que:
rf−ri=Δr
Dicho esto, podemos definir a la velocidad media como
vmedia=ΔtΔr
Y de esta forma podemos definir
v=Δt→0limΔtΔr
a=Δt→0limΔtΔv
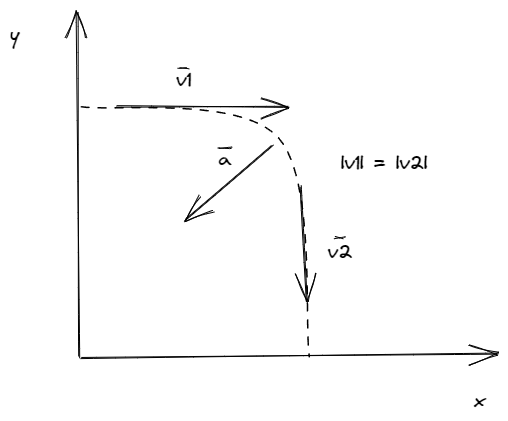
Ahora “acelerar” no necesariamente significa un cambio en magnitud ∣v∣=v, sino que puede representar un cambio en la dirección de v. Es decir, un movimiento puede ser acelerado y mantener una velocidad constante a la vez.
Veamos un ejemplo, supongamos que un movil dobla un esquina. Tanto antes como despues de girar, su velocidad fue la misma en tanto magnitud, pero cambio su dirección debido a una aceleración perpendicular a la trayectoria del movil.
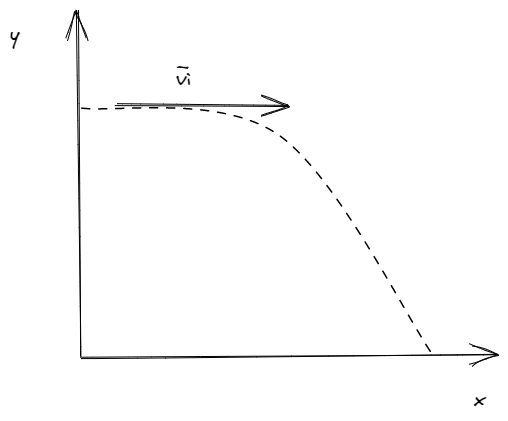
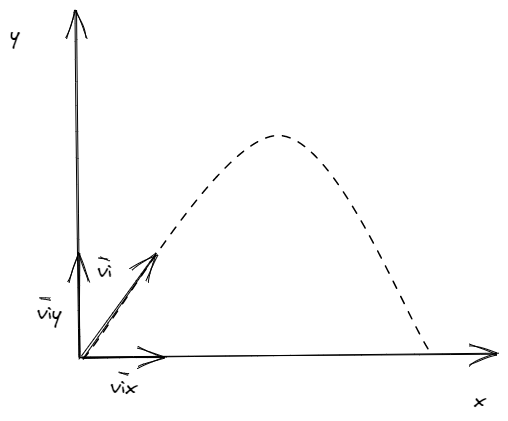
Movimiento de un proyectil
Si arrojamos un objeto con una velocidad inicial vi que no represente una caida libre o un tiro vertical, observamos que dicha velocidad tiene componentes tanto en el eje x como en el eje y. A este tipo de movimiento se lo conoce como tiro oblicuo, y es un caso más de un MRUA donde la aceleración que percibe el objeto no es otra que la gravedad.
Las ecuaciones para este tipo de movimiento son similares a las ecuaciones dadas para movimientos unidimensionales, solo que precisa de la descomposición de los vectores.
La caída libre o el tiro vertical son simplemente casos particulares en los que la vx=0,ax=0,ay=−9,8s2m. A la componente de la aceleración en el eje y se la conoce como aceleración de la gravedad y se la simboliza con la letra g.
Entonces podemos construir las ecuaciones para tiro oblicuo:
Δr=(rx,ry)=⎩⎨⎧rx=rx0+vx0try=ry0+vy0t−21gt2
Δv=(vx,vy)=⎩⎨⎧vx=vx0vy=vy0−gt
El tiro oblicuo es la composición de dos movimientos, uno en MRU con relación a las componentes en x y otro en MRUA con relación a las componentes en y.
Lo siguiente que vamos a hacer es describir la trayectoria del objeto. Para ello, usaremos las componentes de Δr=(x,y)