
Guía 1 - Movimiento circular, coordenadas polares, Movimiento relativo

Movimientos curvilíneos
Otra forma de expresar los vectores es en base a los versores de los ejes de coordenadas. Por ejemplo, si adoptamos los ejes cartesianos e , podemos expresar como donde y son los versores de los ejes e .
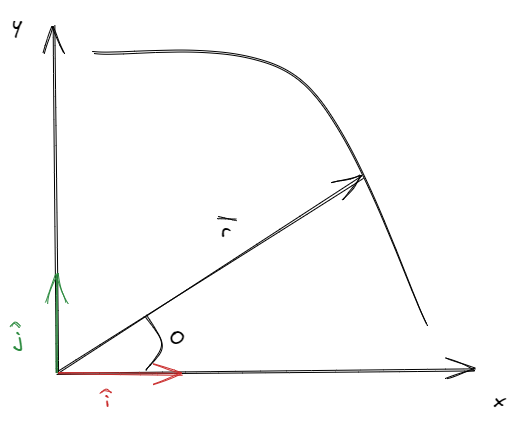
Una forma alternativa de describir vectores es utilizando coordenadas polares. En este sistema, un vector se describe mediante su magnitud y su ángulo respecto a un eje de referencia que en general es el eje . Las coordenadas polares se pueden expresar como , donde es un versor unitario que apunta en la dirección del vector.
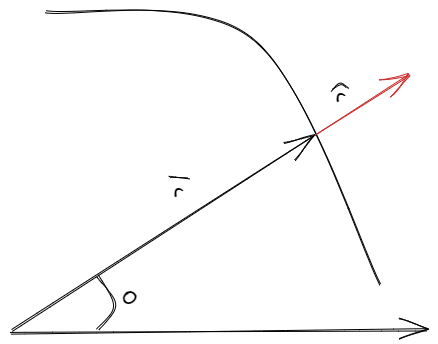
Cuando uno observa la nueva notación , puede preguntarse donde se encuentra expresado . Este último valor esta implícito dentro del verso . En la modida que cambia, tambíen lo hace. Esto no ocuerre con las coordenadas cartesianas, donde las componentes son totalmente independientes.
Otra dificultad con la que nos vamos a encontrar es al momento de derivar . En coordenadas cartesianas, derivar era algo sencillo ya que se trataba de una suma:
Dado que y son constantes, todo quedaba en derivar e , pero en coordenadas polares debemos derivar un producto y una función compuesta
Donde lo podemos expresar en coordenadas cartesianas como:
Entonces para obtener la velocidad en coordenadas polares
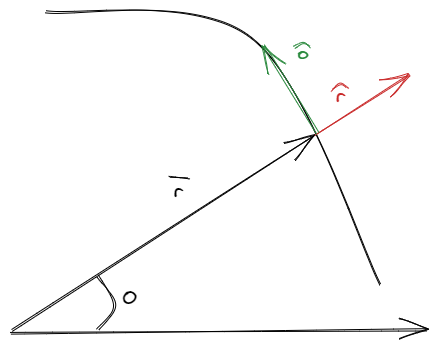
Ahora debemos saber como derivar . Para esto hay que tener en cuenta que:
Y por tanto (recordar la regla de la cadena)
Entonces, la velocidad queda expresada como
Se puede decir que representa la velocidad radial, mientras que representa la velocidad “en ”.
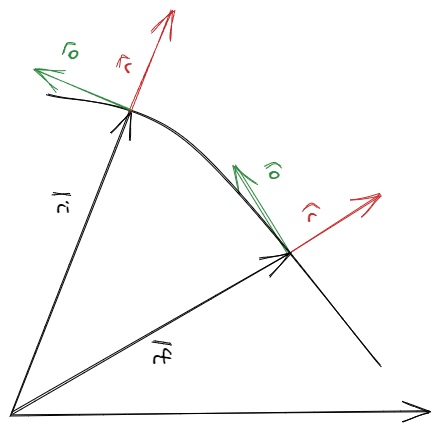
El siguiente paso es obtener como la derivada de la velocidad. Para llevar adelante esta engorrosa tarea, antes vamos a calcular la derivada de
Con este resultado, tratamos de llegar a la expresión de la aceleración
Donde es conocida como la aceleración radial o centrípeta, mientras que es la aceleración en
Movimiento circular
Describir movimientos del tipo rectilíneos u oblicuos mediante coordenadas polares no tiene sentido en si mismo debido a su complejidad en comparación a las coordenadas cartesianas. Sin embargo, cuando el movimiento a describir es del tipo circular, la complejidad se invierte.
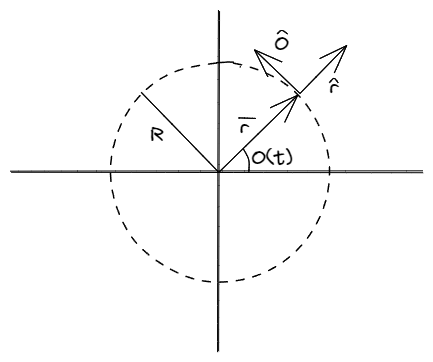
Si un móvil describe un movimiento circular de radio constante, entonces es constante para todo y lo único que varia es . Hasta ahora no le prestamos mucha atención a la variación del ángulo, pero ahora tiene sentido derivarla y obtener que se conoce como velocidad angular.
En cuanto a las unidades, se suele usar radiantes para dado que si los multiplicamos por el radio del movimiento, obtenemos el arco recorrido. Dicho lo anterior, decimos que aunque es muy común obviar los y expresar sus unidades como .
Siguiendo nuestra línea de trabajo, no tardamos en llegar al concepto de aceleración angular definida como , donde .
Análogamente a lo que ya vimos, podemos definir las ecuaciones de movimiento angular como
Dado que es constante para todo instante de tiempo , simplifica bastante las ecuaciones antes dadas para aceleración y velocidad, quedando
Notar que la velocidad esta definido únicamente sobre el versor que es tangente al movimiento, razón por la cual, a esta velocidad se la llama velocidad tangencial.
En este caso, la aceleración posee componentes tanto en versor como en versor. A la componente en se la conoce como aceleración tangencial.
Observar que la componente en que llamamos aceleración centrípeta, es negativa, es decir, apunta hacia el centro del movimiento circular. Esta aceleración es la responsable del movimiento circular. De hecho, podemos tener una aceleración tangencial nula y aun poseer un movimiento circular. A este caso se lo conoce como movimiento circular uniforme (MCU) donde y el modulo de la velocidad tangencial es siempre constante, es decir, , y la aceleración centrípeta también resulta constante .
En MCU tenemos que un objeto recorre de forma periódica la misma trayectoria con la misma velocidad (en tanto magnitud), por ende, podemos hablar de periodo que es el tiempo en el que un objeto completa un giro.
Al periodo de un MCU se lo simboliza con la letra y se lo puede calcular a través de .
Y si hablamos de periodo, podemos hablar de frecuencia, que se simboliza con la letra y representa la cantidad de giros que realiza un objeto en una unidad de tiempo. Se lo puede calcular a través de como o como .
Movimiento relativo
Dado dos observadores y , con sus propios sistemas de referencia, pueden observar a un mismo objeto y describirlo de forma distinta.
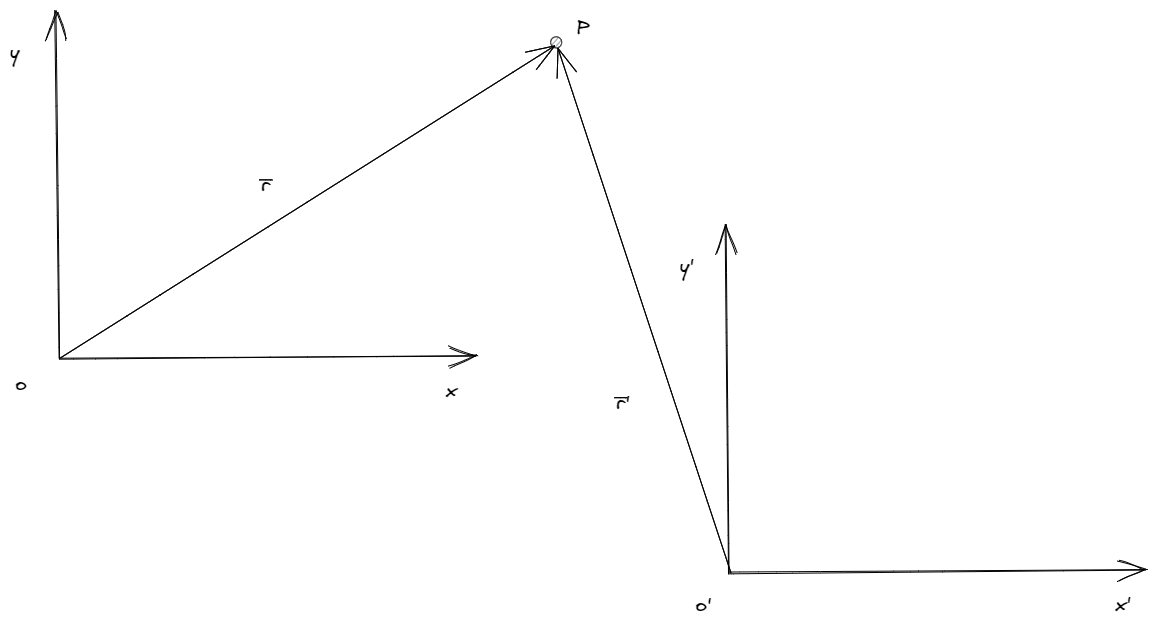
En estos casos, lo que se suele plantear es a un observador como fijo, digamos (esto por convención) y a través de él describir al sistema de referencia de .
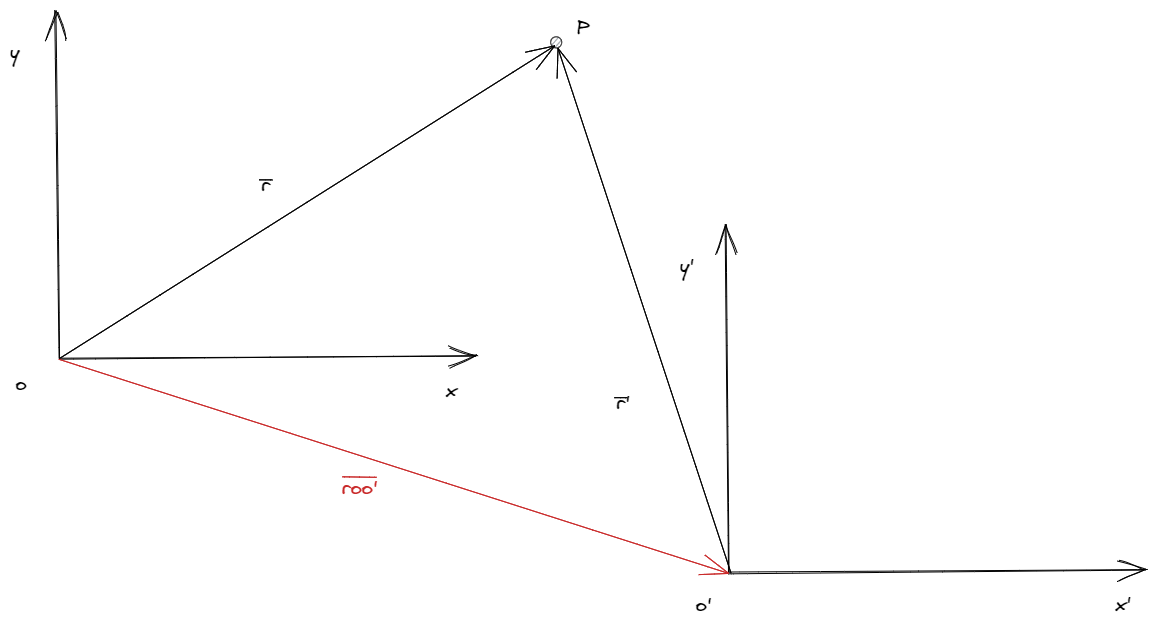
De esta forma, podemos establecer una relación entre los observadores y el objeto observado
Con esto, ya podemos determinar las subsecuentes magnitudes: velocidad y aceleración